robotart(机器人离线编程软件)
v5.2.0.2795 竞赛版大小:147.88 MB 更新:2020/04/10
类别:编程工具系统:WinXP, Win7, Win8, Win10, WinAll
分类分类
大小:147.88 MB 更新:2020/04/10
类别:编程工具系统:WinXP, Win7, Win8, Win10, WinAll
RobotArt竞赛版是一款由由北京华航唯实机器人科技股份有限公司推出机器人离线编程软件,此版本为竞赛版,用户可以通过它进行编程学习,可以学习很多关于比赛需要注意的事项,还可以通过它进行编程练习;创造性的把离线编程方法流程化、体系化,借助这套理论体系,机器人离线编程的过程就如搭积木一样,化繁为简,极易上手;借助该程序,用户可以从最基础的场景构建开始,到最终的复杂机器人离线仿真效果实现,整个过程循序渐进,会一步步呈现在大家面前;用户可以通过导入您需要进行编辑的模块,然后依据设定的工作方案,将机器人、工具、零件、状态机等摆放到与实际环境中一致的位置,这些都可以通过编程来实现,需要的用户可以下载体验

1、支持工件校准功能,能够根据真实情况与理论模型的参数误差自动调整轨迹参数。
2、支持多种格式的三维CAD模型,可导入扩展名为STEP、IGS、STL、x_t、prt(UG)、prt(ProE)等格式。
3、可视化轨迹优化和机器人姿态优化功能。
4、包括焊接、喷涂、去毛刺、数控加工等多种工艺包。
5、支持多种品牌工业机器人离线编程操作,可导入本体模型,控制各轴运动,仿真运行设计的轨迹(例ABB、KUKA、Staubli、广州数控等)。
6、支持自由组装、设计机器人,学习机器人原理与运动过程。
轨迹生成与编辑
九大类生成轨迹方式,上百个轨迹参数,数十个参数化轨迹修改方式,总有一款适合您!
可达空间
软件不仅可以计算机器人的法兰位置的可达空间,也可以计算机器人末端执行器的可达空间,让您的工作站设计和轨迹规划更加真实高效。

外部工具
机器人工作方式常见的有以下两种:
1. 手持工具,零件固定;
2. 手持零件,工具固定;
第二种成为外部工具,变成更复杂。PQArt提供了外部工具、变位工具、连续TCP、工件坐标系等配合使用,使手持零件不再复杂。

碰撞检测
仿真时,开启碰撞检测功能,可以模拟检测出机器人在运动时和周边的零部件、设施的碰撞情况,并通过高亮线和输出碰撞信息加以提示。
轨迹优化处理
可把轨迹中的奇异点、轴限位、不可达、碰撞等信息反映在界面上,通过鼠标拖动自动避让,快速获得理想轨迹,提高工作效率。
外部轴
通过外部轴联动的插值功能,用户可优化外部轴位置以实现沿整个刀具路径的平滑运动,而不需要手动修改每个机器人之间的目标位置控制点。

1、用户可以点击本网站提供的下载路径下载得到对应的程序安装包
2、只需要使用解压功能将压缩包打开,双击主程序即可进行安装,弹出程序安装界面

3、同意上述协议条款,然后继续安装应用程序,点击同意按钮即可
4、可以根据自己的需要点击浏览按钮将应用程序的安装路径进行更改
5、弹出应用程序安装进度条加载界面,只需要等待加载完成即可

6、根据提示点击安装,弹出程序安装完成界面,点击完成按钮即可

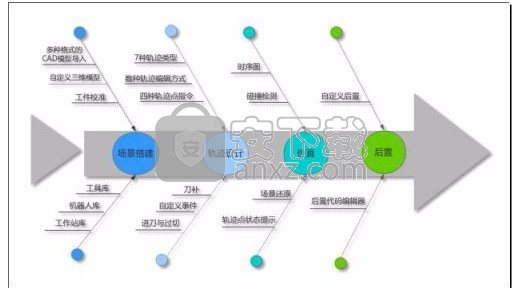
RobotArt这套一站式解决方案,总体的操作使用流程包括四大步骤:场景搭建、轨迹设计、仿真、后置。
*软件的详细基本功能介绍及使用方法,请看【RobotArt使用手册】。
2.2 ABB机器人写字(“科”字)
介绍这个写字的小案例,目的是让大家能够在最短的时间内,对整个RobotArt的使用流程、使用方法有个简单明确的了解和感受,从而达到快速入门的效果。
整个机器人写字流程如下:
(1)从工作站库内下载名为“ABB机器人写字(“科”字)”的工程文件
下载位置:
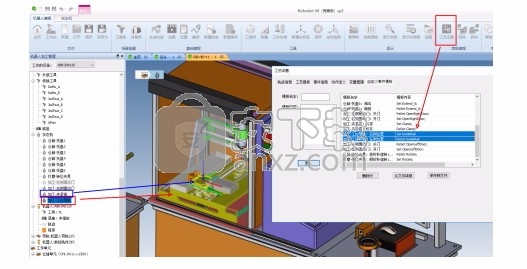
A.单击RobotArt机器人离线编程软件顶部的功能面板【机器人编程】/【文件】/【工作站】;

B.在展开的“选择工作站”界面单击“分类:界面”,找到“ABB机器人写字(“科”字)”工作站;
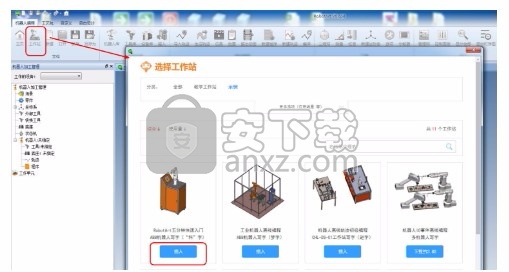
C.单击【插入】按钮,下载即可。
下载后的场景:

(2)校准:(篇幅有限,校准这里不做详细介绍,详细请看RobotArt官网的“学Art”下的第三本书《RobotArt使用手册》内的相关知识点介绍)
校准一般是在添加轨迹前要做的事情,这边需要两方面的东西,因为事先已经对RobotArt设计环境内的工具、零件等进行了校准。
因此相关校准方面的知识点就不过多进行描述,下面只是简单介绍一下里面的关键步骤:
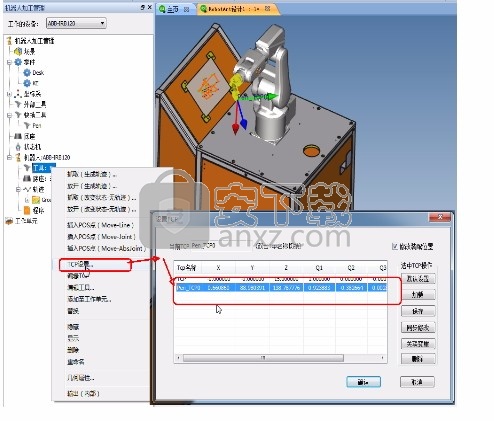
A.工具自身的TCP校准
首先,一般做这些前,机器人自身首先要自身进行机械零点校准;
其次,要通过四点或五点校准法,把自身安装的和RobotArt软件内的一致的工具的TCP进行校准,即TCP校准;
最后,将机器人校准的TCP值 (XYZABC),抄录到RobotArt软件内,工具的右键【TCP设置】界面内。
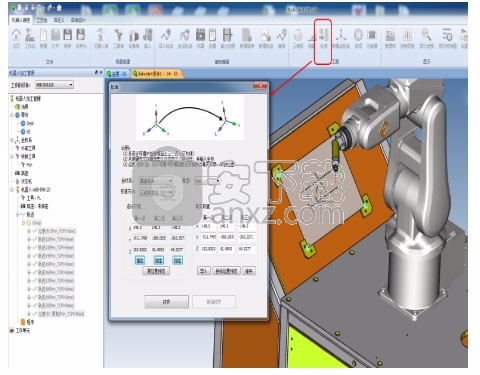
B.工件的校准
轨迹将来要借助零件上的边线或者3D曲线去生成轨迹,因此要确保软件内的设计环境和真实环境内,机器人和零部件之间的空间位置关系一致是关键。
因此,一般机器人工作站会专门有个校准用的顶尖工具,先通过机器人对顶尖工具的尖头部分进行校准TCP(四点或五点...校准法);
然后,借助这个顶尖工具,用顶尖去碰把真实环境下零件上的三个点,并用纸张记录下来这时机器人的顶尖的TCP的空间坐标,一般是XYZABC;
最后,借助RobotArt软件内的【校准】功能,对软件内的零部件进行校准,确保它与机器人之间空间位置关系和真实环境下的一致。
(3) 轨迹添加:
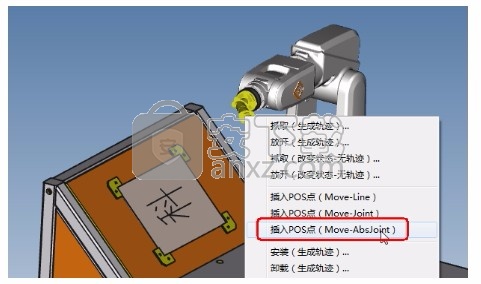
A.Home点添加(起始点)
在开始让机器人动起来前,机器人一般处于近似机械零点或者一个比较安全的位置,为了仿真真实,这个点是需要用轨迹点记录下来。
一般情况下,只要选中机器人的法兰工具,右键内单击【插入pos点(Move-AbsJoint)】即可。
B.写字轨迹添加
通过写字工艺包内的轨迹类型“曲线特征”生成绘制轨迹,设置轨迹参数
功能位置:
RobotArt机器人离线编程软件顶部的功能面板【工艺包】/【绘画工艺包】/【写字工艺】,单击它

曲线特征(轨迹创建过程):
a.在左侧“写字工艺”面板上,类型下拉菜单内,选中“曲线特征”;
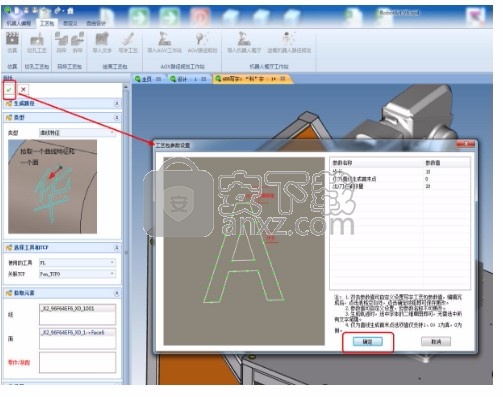
b.按要求拾取元素:(曲)线、面;
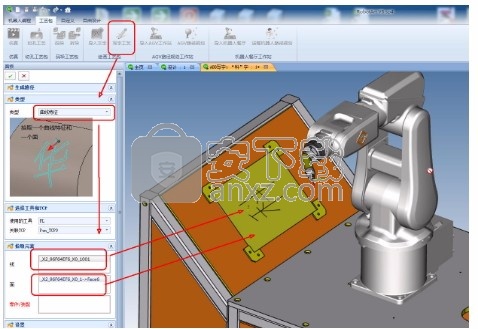
c.然后单击面板左上角的【对勾】按钮,会弹出设置出入刀点的界面,直接单击【确定】,完成轨迹创建。
C.Home点添加(结束点)
在机器人,机器人完成写字(加工)轨迹后,安全起见,一般会将其姿态调整到近似机械零点或者一个比较安全的位置上,这个点也是需要记录下来。
一种办法就是如上面的步骤"A.Home点添加(起始点) " 所描述的办法那样,把机器人的各个轴的姿态调整到安全位置,然后插入pos点;
另一种的简单办法:选中轨迹的第一个pos点,右击;然后单击右键菜单内的【复制轨迹】,即可创建机器人的结束位置Home点。
(4)仿真调试:
功能位置:
RobotArt机器人离线编程软件顶部的功能面板【机器人编程】/【基础编程】/【仿真】,单击它
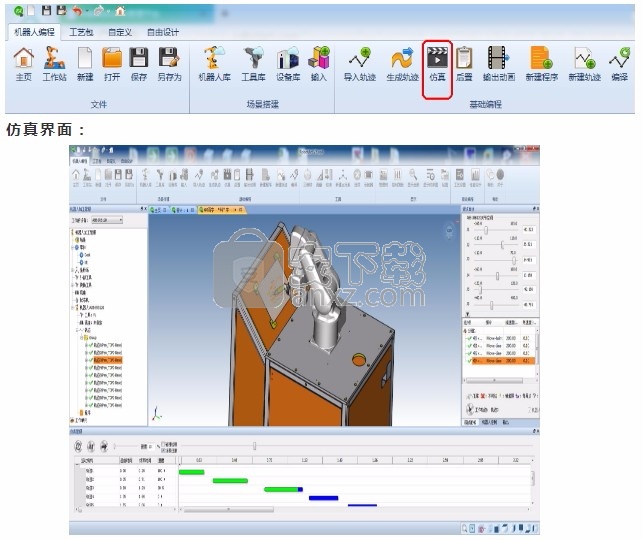
仿真界面:

借助仿真结果,调整轨迹使其无轴超限点、不可达点或奇异点。(本例轨迹编译后自动正常,不用调整)
详细的轨迹调整、优化的办法,请看 RobotArt官网的“学Art”下的第三本书《RobotArt使用手册》)
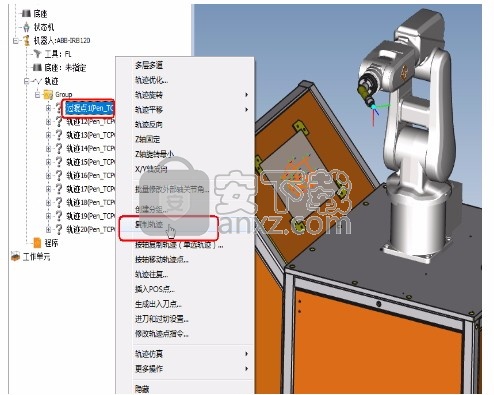
(5)后置生成程序
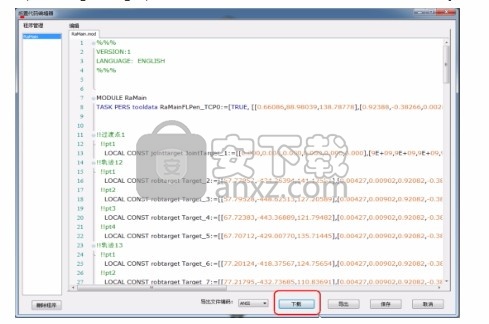
单击RobotArt离线变成软件顶部的功能面板:【机器人编程】/【基础编程】/【后置】;
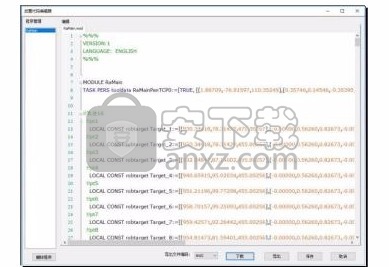
即可将机器人轨迹转换为ABB可以识别的指令格式文件,呈现在“后置代码编辑器”界面内(如下图);

单击“后置代码编辑器”界面下侧的【导出】按钮,可以将后缀为“*.mod”的ABB后置代码文件导出、存储。

(6)保存工作站
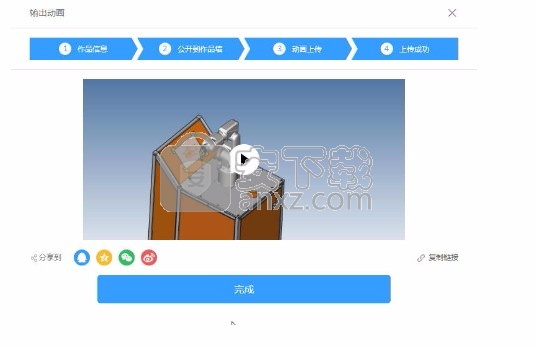
(7)输出动画
2.3上机调试运行(这是后续操作流程简介,知识点延伸讲解,不在五分钟范围之内)
上面例子中的机器人,采用的是ABB的ABB-IRB120 机器人。假如您身边恰巧有这台机器人的话,可以将上面”后置出来的ABB后置的RaMain.mod文件上真机试运行一把。
A.上传后置代码:
上传ABB代码有两种办法:
a.下载到ABB控制器:
当安装RobotArt软件和ABB-IRB120的主机事先已经用网线连接,并设置连接IP,则可以在后置界面内,单击【下载】,即可将后置代码直接传输给ABB示教器。
b.使用优盘(U盘),将后置的RaMain.mod文件直接拷贝到示教器内。
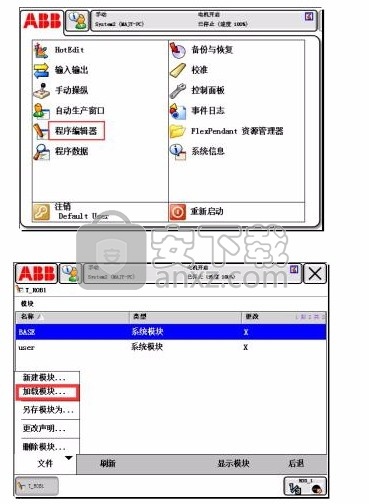
大致步骤就是通过 ABB示教器内的【程序编辑器】-【文件:加载模块】,将U盘内的 后置文件,拷贝到ABB的示教器内。

B.示教器操作:
在程序编辑器内,找到刚才导入的后置格式的文件,单击【显示模块】将后置代码显示出来。
C.真机运行:
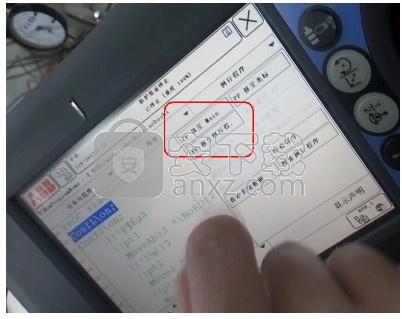
有些老的示教器,打开导入的代码后,需要单击界面右上侧的【例行程序】,将当前程序加入到【PP移动到例行程”】,才能后续真机运行:

当机器人的后置代码导入例行程序内后,按下示教器背部的“使能”按键,接着点击示教器面板上的“运行”,则机器人开始按照已编好的程序开始工作。
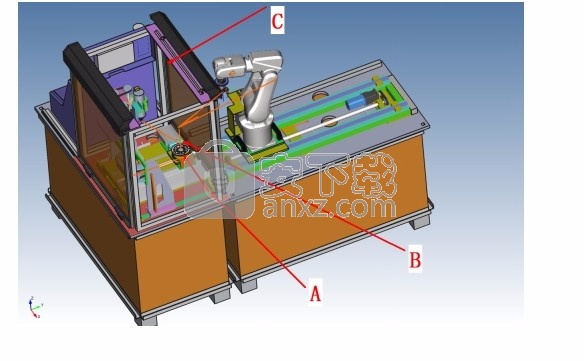
加工单元模型变更说明
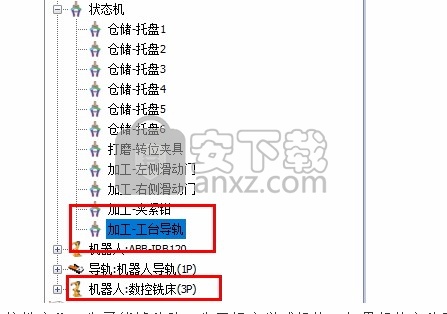
1.增加机构:“数控铣床(3P)”
加工单元内的 “数控铣床”,为了能够移动,先已经定义成机构,如果想使之移动,需要通过拖动机器人关节轴和添加pos点来实现。
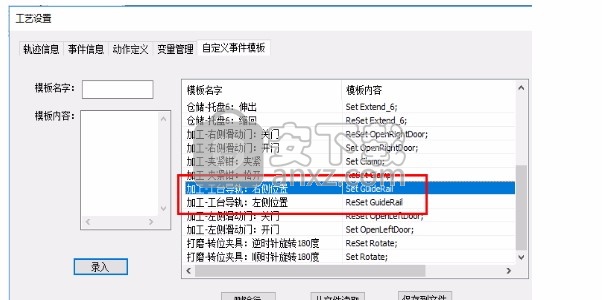
2. 增加状态机:“加工-工台导轨”
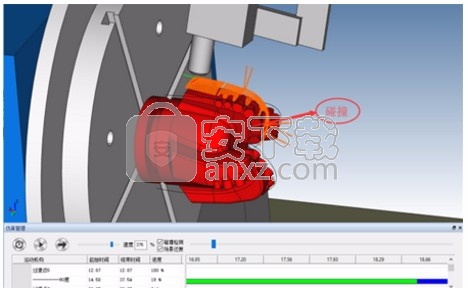
将原先的一轴的加工单元上的导轨,改为和实际相符的“状态机”(实际该设备只有两个状态,或者在一段或者在另一端,和软件内的状态机的概念更加接近,因此改为了状态机),请看上面图示。 另外增加的“加工-工台导轨”,在工艺设置的自定义事件模板内,已经增加了相应的控制事件。来实现“加工-工台导轨”的两种状态。请看下图:
加工单元内增加了一个夹紧钳状态机,通过选中轨迹点添加自定义事件,来实现其夹紧和松开的动作。

4. 轨迹添加
A. 轮毂上不用刻意添加轨迹
如果考试需要,只插入几个pos点,演示一下“数控铣床(3P)”,可以运动即可。
如果想做个真实的,则在“数控铣床(3P)”被激活的清涕下,可以通过“生成轨迹”命令中的“面的外环”去创建轨一圈轨迹,后续对轨迹进行“Z轴固定”即可。
B. 夹紧钳的控制
因为是状态机,可以用自定义事件去控制它的“夹紧/松开”状态。
C. 隐藏加工单元防护罩
当A下面描述的两种情况下,激活铣床刀具TCP三维球的情况下,想借助轮毂的特征去定位铣床刀具tcp的空间位置。因为状态机本身功能限制,目前暂时无法通过穿透状态机(即使状态机是被隐藏掉)去选取轮毂。
因此,可以通过隐藏加工单元侧面的防护罩(直接在绘图区选中后,右键单击隐藏)的办法来实现。
1. 大赛主办方
全国职业院校技能大赛由教育部与人社部、工信部等37个部委、单位共同主办。
2. 比赛持续的时间
高职赛比赛时间规定:各竞赛队在5个小时内,独立完成规定的所有竞赛任务。竞赛日期由全国职业院校技能大赛执委会及赛区执委会统一规定,竞赛预计安排5天,正式比赛2天。
3. 大赛的评定标准和要求
大赛设备以汽车零部件加工打磨检测工序的智能制造单元为背景,选手通过方案设计、硬件搭建、系统集成与调试等任务,完成智能制造单元搭建,满足定制化的制造加工过程。工业机器人从立体仓库拾取待加工轮毂,放置到数控机床中选择适当程序完成加工工序,工业机器人实现打磨抛光加工,利用传感器检测加工效果,MES系统对制造过程信息和设备状态实时采集和可视化,智能终端利用云端实现安全的制造数据远程监控和流程控制,优化工序流程提高生产效率。
Embarcadero RAD Studio(多功能应用程序开发工具) 编程工具177.22 MB12
详情猿编程客户端 编程工具173.32 MB4.16.0
详情猿编程 编程工具173.32 MB4.16.0
详情VSCodium(VScode二进制版本) 编程工具76.23 MBv1.57.1
详情aardio(桌面软件快速开发) 编程工具9.72 MBv35.69.2
详情一鹤快手(AAuto Studio) 编程工具9.72 MBv35.69.2
详情ILSpy(.Net反编译) 编程工具3.97 MBv8.0.0.7339 绿色
详情文本编辑器 Notepad++ 编程工具7.81 MBv8.1.3 官方中文版
详情核桃编程 编程工具272.43 MBv2.1.120.0 官方版
详情delphi2007完整 编程工具1198 MB附安装教程
详情SAPIEN PrimalScript2015 编程工具78.02 MB附带安装教程
详情Alchemy Catalyst可视化汉化工具 编程工具81.00 MBv13.1.240
详情Professional Tag Editor(通用标签编辑器) 编程工具25.6 MBv1.0.6.8
详情Coffeecup HTML Editor(html网页编辑器) 编程工具68.98 MBv15.4 特别版
详情JCreator Pro 编程工具9.65 MBv5.0.1 汉化
详情WebStorm 12中文 编程工具209.88 MB附带安装教程
详情MSWLogo(多功能项目开发与管理工具) 编程工具2.25 MBv6.5 免费版
详情JetBrains datagrip 2018.2.1中文-datagrip 2018.2.1 编程工具160.88 MB附注册码汉化包
详情易安卓5.0 编程工具202 MBv5.0 附破解补丁
详情keil uvision5 编程工具271.63 MB附带安装教程
详情CIMCO Edit V8中文 编程工具248 MB附安装教程
详情IntelliJ IDEA 2020.1(java集成开发环境) 编程工具643.0 MB附安装教程
详情redis desktop manager2020.1中文 编程工具32.52 MB附带安装教程
详情猿编程 编程工具173.32 MB4.16.0
详情信捷PLC编程工具软件 编程工具14.4 MBv3.5.2 官方版
详情源码编辑器 编程工具201.0 MBv3.4.3 官方版
详情Microsoft Visual C++ 编程工具226.00 MBv6.0 SP6 简体中文版
详情s7 200 smart编程软件 编程工具187 MBv2.2 官方中文版
详情TouchWin编辑工具(信捷触摸屏编程软件) 编程工具55.69 MBv2.D2c 官方版
详情易语言5.8完美 编程工具312 MB5.8.1 破解增强版
详情Scraino(少儿编程软件) 编程工具272.93 MBv0.3.0 官方版
详情vs2008中文 编程工具1495 MB附序列号
详情e盾网络验证源码 编程工具25.77 MBV45 官方版
详情codeblocks 编程工具95.21 MBv13.12 中文完整版(带GNW编译器
详情Android Studio(安卓开发环境) 编程工具983.0 MBv3.5.0.21 汉化版(附安装教程)
详情源码编辑器pc版 编程工具201.0 MBv3.4.3 官方版
详情CH341A编程器 编程工具1.06 MB1.30 绿色中文版
详情layuiAdmin pro(layui后台管理模板系统) 编程工具0.57 MBv1.1.0 单页版
详情海龟编辑器 编程工具71.5 MBv0.8.4 中文版
详情Ardublock中文版(Arduino图形化编程软件) 编程工具2.65 MB附带安装教程
详情文本编辑器 Notepad++ 编程工具7.81 MBv8.1.3 官方中文版
详情富途牛牛 编程工具160.59 MBv11.8.9068 官方版
详情微信开发者工具 编程工具129.37 MBv1.05.2105170 官方版
详情UEStudio v18.0.0.18 简体中文绿色 编程工具19.00 MB
详情十六进制编辑器 WinHex 编程工具2.79 MBv20.2 SR-5
详情代码编辑器 Sublime Text 编程工具54.74 MBv4.0.0.4126
详情RJ TextEd(代码编辑器) 编程工具49.46 MBv15.31
详情核桃编程 编程工具272.43 MBv2.1.120.0 官方版
详情影刀 编程工具306.37 MBv4.9.14
详情Kate(高级文本编辑器) 编程工具56.11 MBv21.12.1.1544
详情